"The results suggest that the coarse text-cell retrieval serves as a foundational step in the overall localization process. The subsequent fine position estimation generally improves the localization performance."
"There are cases where the accuracy of this fine estimation is compromised, particularly when the input descriptions are vague, illustrating a detrimental effect on accuracy."
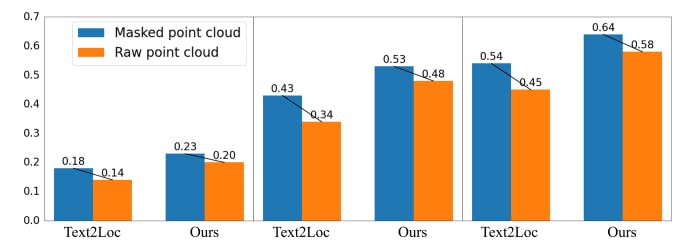
"Unlike accumulated point clouds provided in the KITTI360Pose dataset, real-world LiDAR sensors capture only sparse point clouds, which is crucial for analyzing our IFRP-T2P model."
"When taking the masked point cloud as input, our IFRP-T2P model achieves a localization recall of 0.20 at top-1 with an error bound of 𝜖 < 5𝑚."
Coarse text-cell retrieval is critical for localization, particularly before fine position estimation enhances accuracy. The study identifies performance drops due to vague input descriptions. Unlike other studies, this analysis includes the effects of point cloud degradation from real-world LiDAR sensors, which often yield sparse data. Experiments show that the IFRP-T2P model can perform well with degraded inputs, with a localization recall score recorded under challenging conditions, highlighting its robustness against data loss in practical scenarios.
Read at Hackernoon
Unable to calculate read time
Collection
[
|
...
]